Inter-vehicular communication (IVC) systems promise many potentially beneficial services. Imagine adaptive cruise control monitoring varying speeds and positions of nearby vehicles to automatically adjust your speed and help avoid collisions. Traffic congestion can be reduced by transmitting real time conditions and rerouting motorists to less busy roads. These measures could even lead to a reduction in pollution by decreasing overall travel times.
Unfortunately, a stable communications link faces numerous design challenges. IVC systems require the ability to transmit and receive omnidirectional signals. A single antenna can achieve this goal if perfectly placed; however, vehicles offer very few practical mounting positions. This generally precludes the possibility of optimal placement and leads to the use of multiple antennas. In this MIMO arrangement, the designing engineer must ensure complete coverage. The impact of vehicle shape and material composition further complicates efforts as these properties affect antenna impedance and radiation characteristics.
External variables also play a role in the design of IVC systems. These products must function in a number of environments and operating conditions. The presence of a nearby tractor trailer might reflect or block signals. A wet road surface will propagate fields differently than a dry one, and propagation in urban canyons troubles many communication systems.
Discovering and addressing such obstacles during the design phase greatly reduces the possibility of costly rework and substantially improves the chance of a successful product launch; however, measurements alone may prove insufficient. It can be difficult or impossible to obtain a variety of vehicles to test. Moving an antenna to different mounting locations and taking fresh measurements is time consuming, and the system cannot always be tested in its real operating environment. Also, measurements may only be performed after design and fabrication have been completed. The cost and time involved in fabrication can lead to lengthy and expensive design cycles.
XFdtd provides an accurate and efficient means of modeling these problems. It offers engineers complete control over the number and type of vehicles present as well as surrounding environmental conditions. Design of an antenna or array in XF seamlessly transitions to in-situ tests using the same application, and a more robust design process emerges by evaluating actual operating scenarios prior to fabrication.
This example considers an IVC system functioning in highway traffic conditions on a dry road surface. Two passenger vehicles occupy the right-hand lane of the highway with a large tractor trailer truck to their left as depicted in Figure 1. A vertical monopole tuned to 5.9 GHz and mounted on the rear car functions as the IVC transmitter. The initial simulations capture field interactions between the three vehicles and the road surface in order to determine the feasibility of performing more complex experiments in the future.
Our example begins by constructing the road beneath the cars. The 12 meter stretch of highway in Figure 1 was built using XF’s easy-to-use yet powerful CAD modeling tools. A brief online search yielded CAD files covering a broad range of vehicle make and models. XF supports a wide variety of CAD formats which makes it easy to find compatible files for importation; furthermore, the built-in material libraries already contain most of the materials needed for this work. Figure 2 shows several materials being added to the project from the installed material libraries. By leveraging existing CAD and material libraries, engineers spend less time generating models or searching for material properties which reduces project setup time.
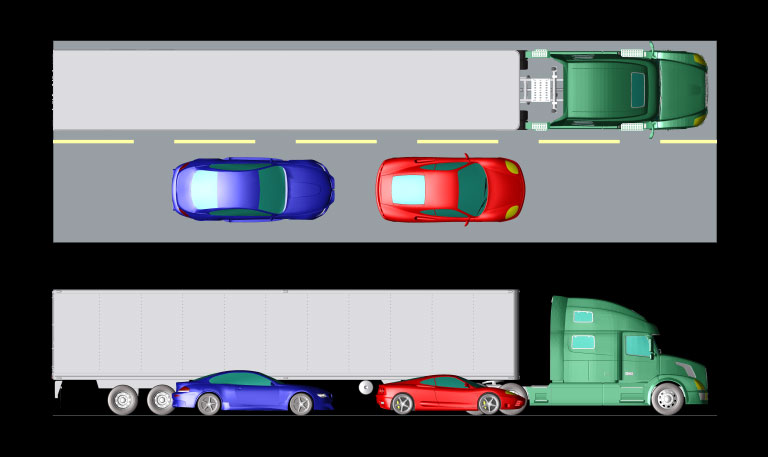
Figure 1: Setup with two passenger vehicles and one tractor trailer truck on a roadbed.
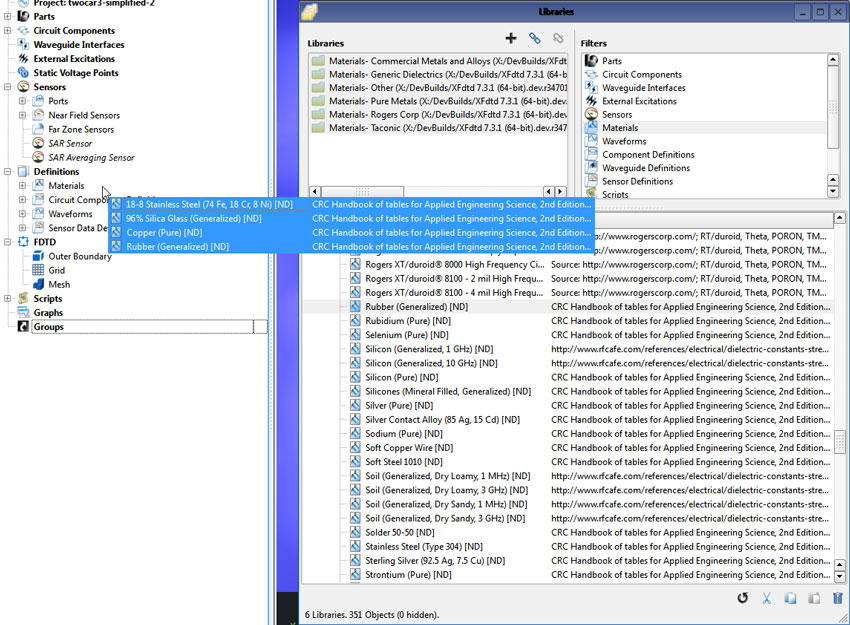
Figure 2: Adding materials to the XF project.
Each vehicle was placed on the road surface using parameterizable working coordinate systems. This enables later experiments regarding system performance as a function of position relative to other vehicles. Video 1 demonstrates how a parameter sweep can modify a vehicle position. For this immediate example, the position is set such that approximately 1.5 meters separates the two cars.
Several potential mounting locations were considered for this work including the front bumper, roof and trunk. The Locator feature in XF allows users to rapidly switch antenna locations in order to facilitate antenna placement investigations. Video 2 demonstrates Locator usage. Ultimately, the commonly-used front bumper position shown at the end of the video serves as the mounting point for our example.
The total volume of the problem space is 3.6x106 λ3 resulting in over 3.7 billion cells when meshed and requiring nearly 120GB of RAM to simulate. Such an electrically large space would have ruled out using a full wave solver not long ago; however, Remcom’s MPI + XStream and large memory support enable XF to easily solve this problem. This simulation was completed in approximately 22 minutes using 24 M2090 GPUs on NVIDIA's PSG Cluster, time on which was provided courtesy of NVIDIA Corporation.
Figures 3 and 4 display the steady state electric fields at 5.9 GHz in a planar slice through the center of the two cars. The results range from -20 dB shown in red to -100 dB shown in black. Figure 5 depicts a top-down view of a planar slice of field data saved at transmitter height, and Figure 6 presents a close up view of the field interactions between the two cars. The remaining figures show the same data from different viewing angles.
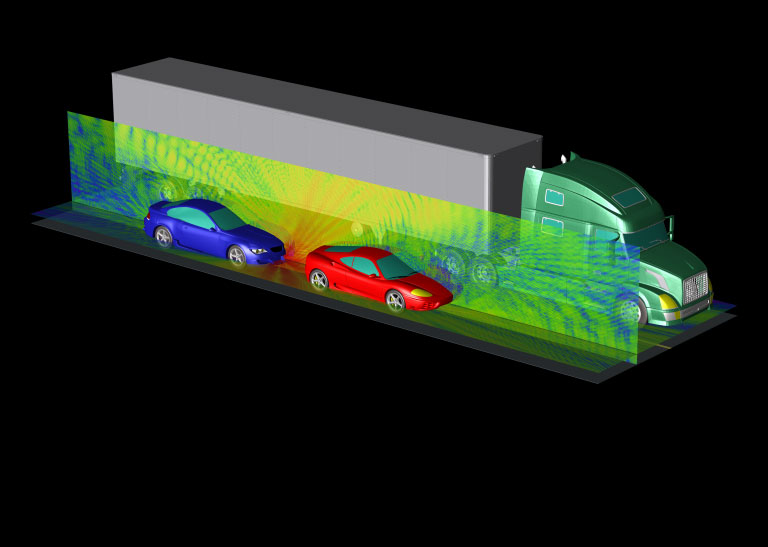
Figure 3: Steady state electric field results at 5.9 GHz close up to the transmitter.

Figure 4: Steady state electric field results in the vertical plane containing the transmitter.
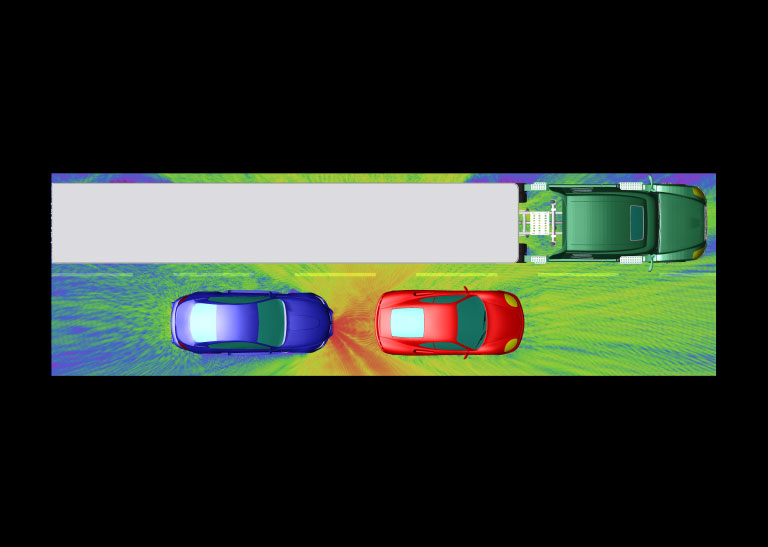
Figure 5: Top down view of steady state electric fields at 5.9 GHz.
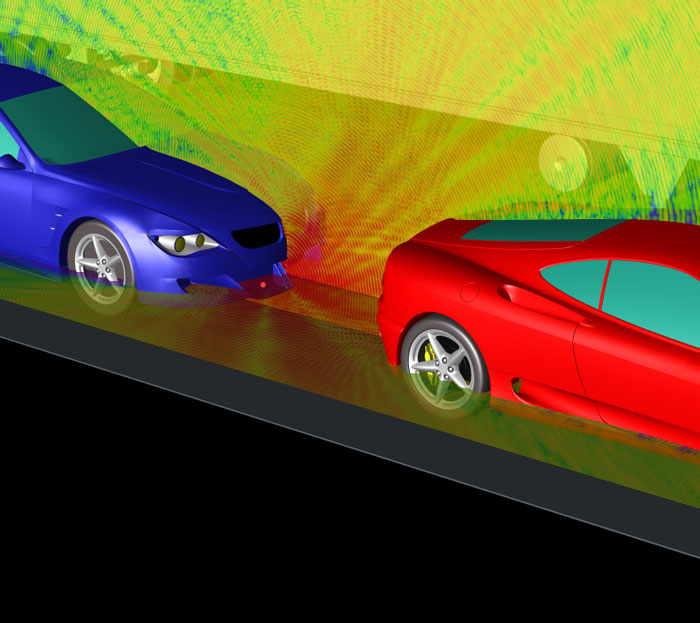
Figure 6: Steady state electric field results at 5.9 GHz close up to the transmitter (red dot).
With this proof-of-concept work complete, we may now move forward with further investigations. Future work will study the effect of vehicle positions on the communications link. We can also consider the impact of antenna placement and material composition of the vehicles. Environmental variables can be modeled such as comparing performance on a dry versus wet road or in an urban canyon rather than on a highway. Combining MPI + XStream GPU Acceleration gives the design engineer the power to fully characterize and understand this complex problem.


